 |
|||
 |
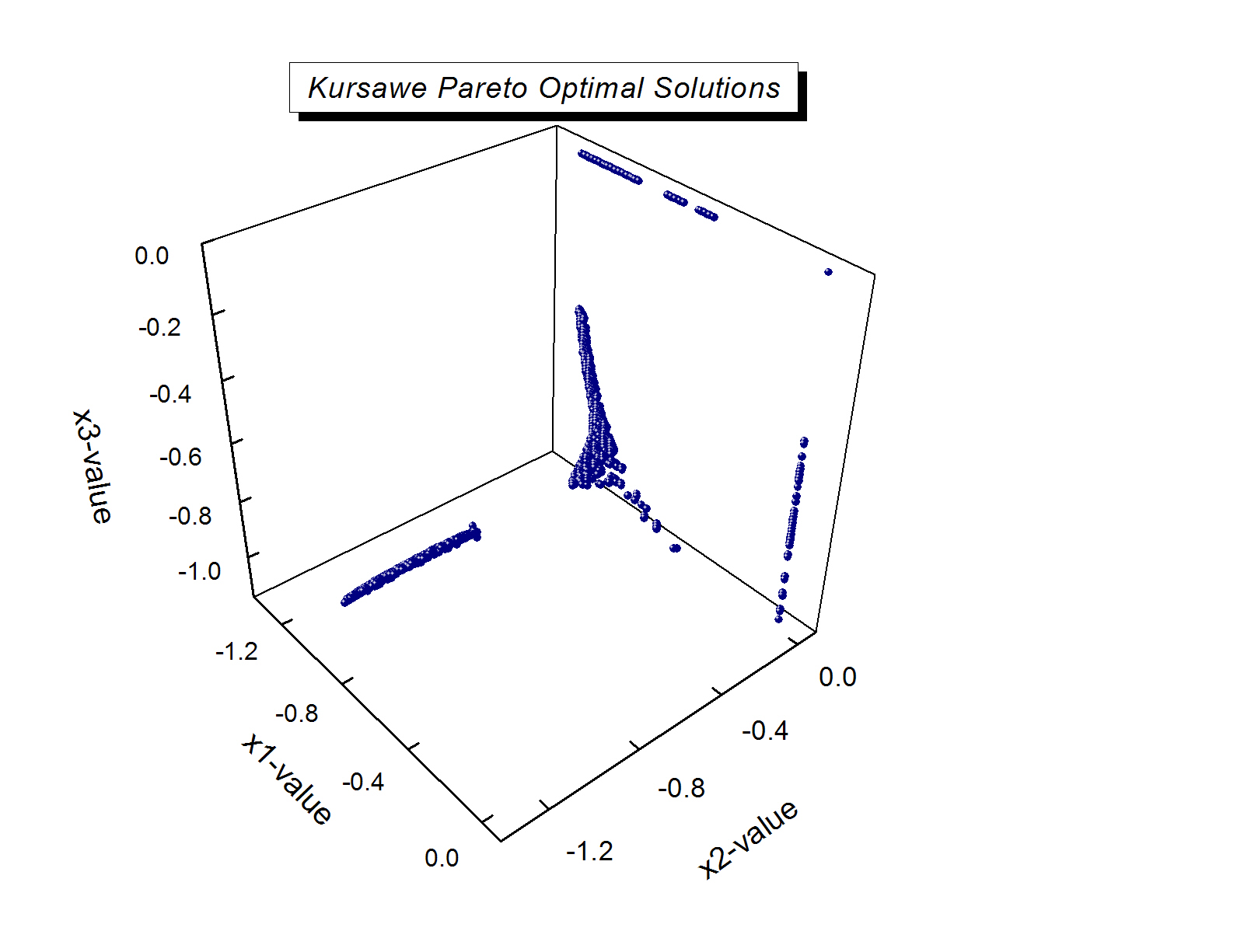
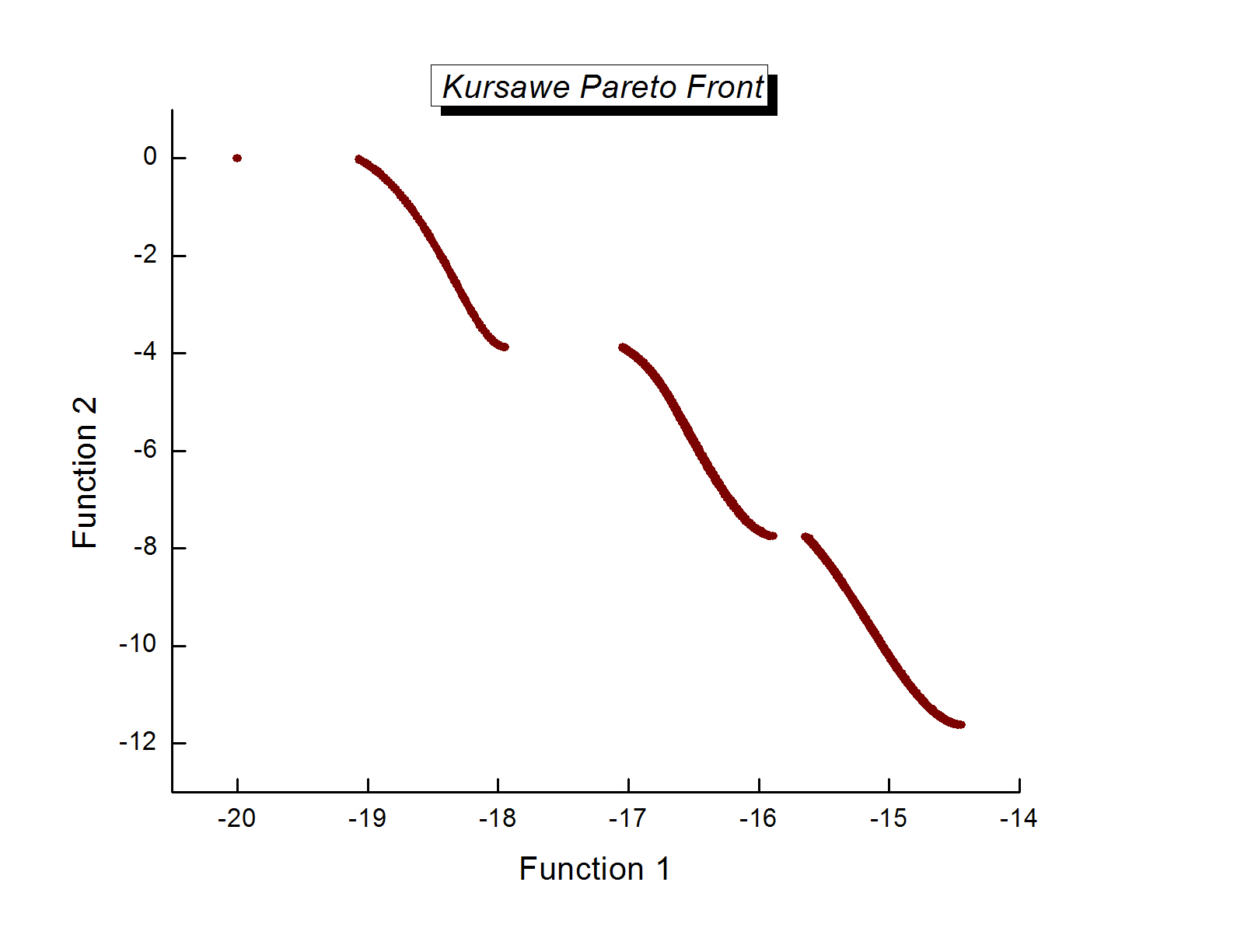
Kursawe Pareto Front (data file)
| KURSAWE | ||||||||||||||||||
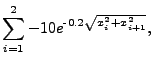
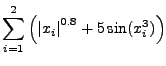
| Proposed by Kursawe
[4].; |
Minimize
|
|
||||||||||||||||
Kursawe Pareto Front (data file) |
||||||||||||||||||
| DEB Bimodal | ||||||||||||||||||||||
| Proposed by Deb [1].; |
Minimize |
|
||||||||||||||||||||
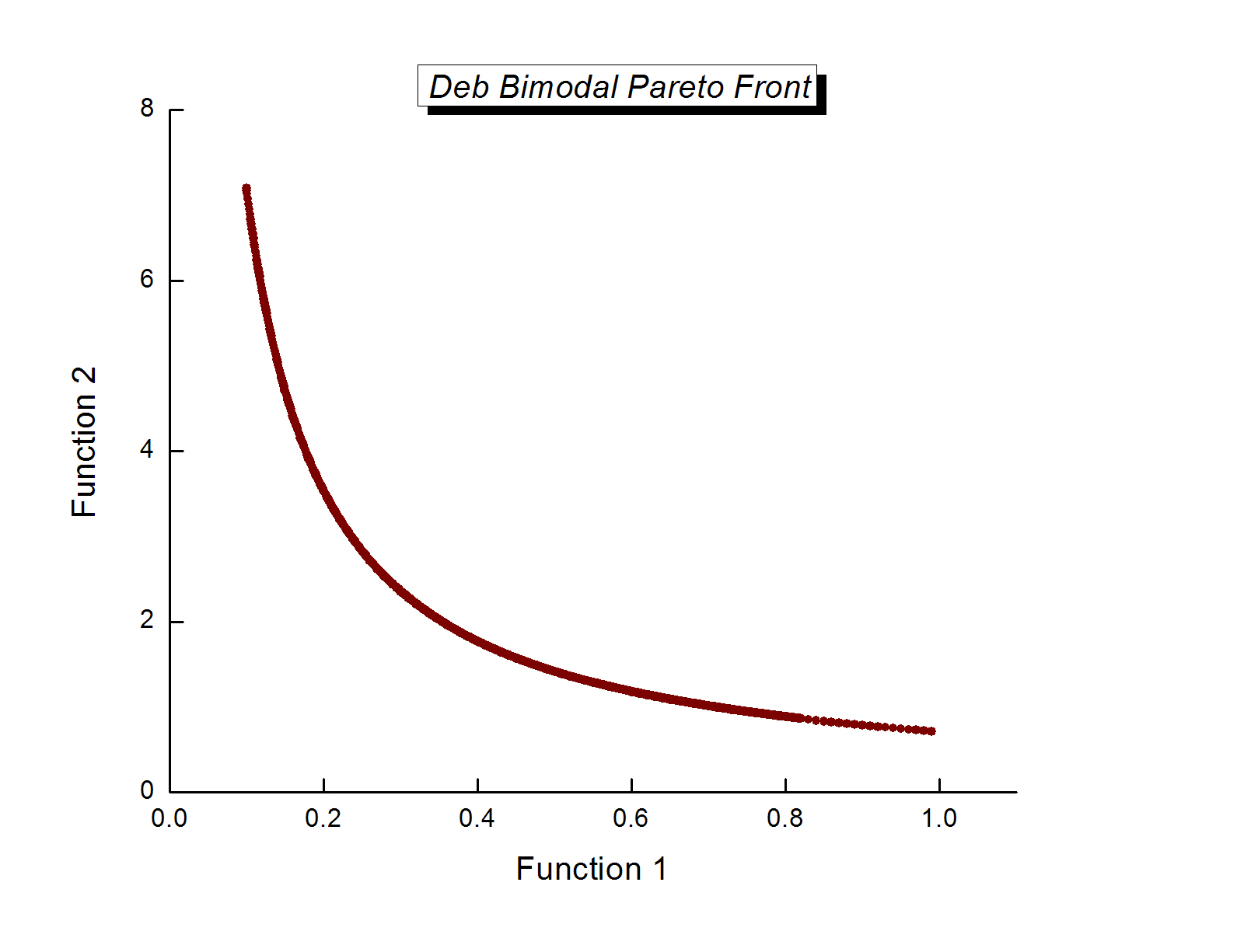 Deb Pareto Front (data file) |
||||||||||||||||||||||
| KITA | ||||||||||||||||||||||||||||||
| Proposed by Kita
[3]; |
Maximize
|
subject
to:
|
||||||||||||||||||||||||||||
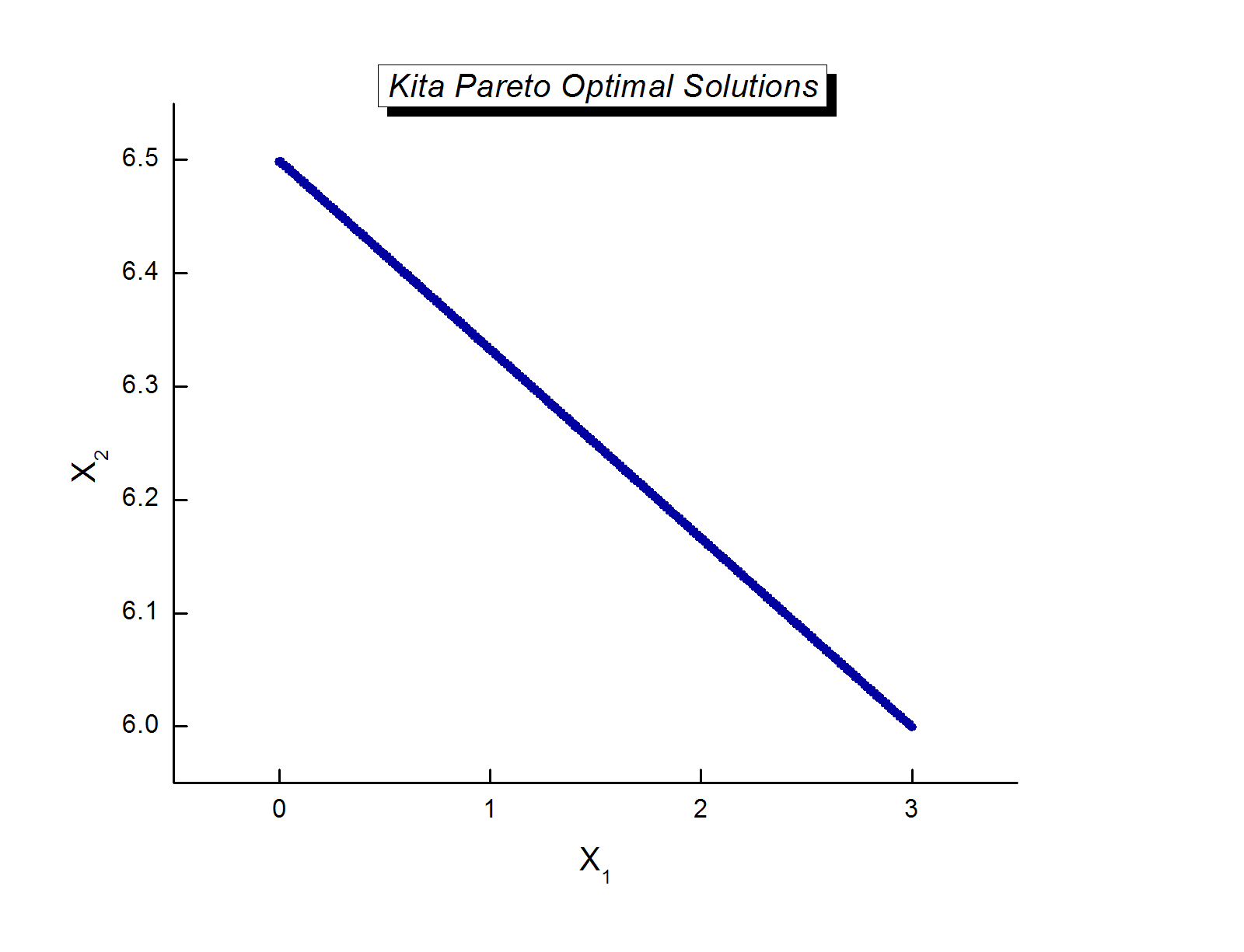 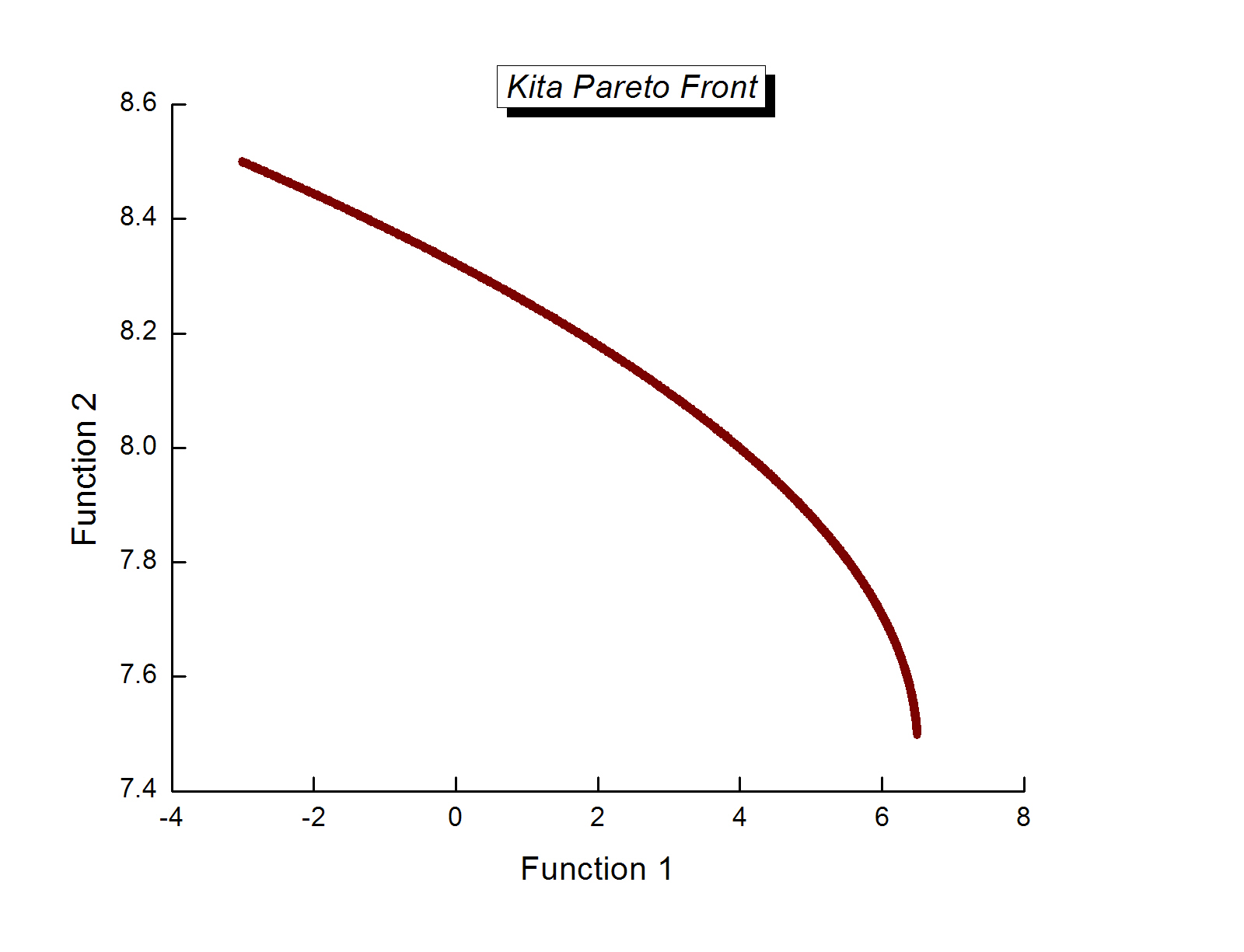 KITA Pareto Front (data file) |
||||||||||||||||||||||||||||||
| DTLZ1 | ||||||||||||||||||||||||||||||||||||||
| Proposed by Deb et. al [2] | Minimize
|
|
||||||||||||||||||||||||||||||||||||
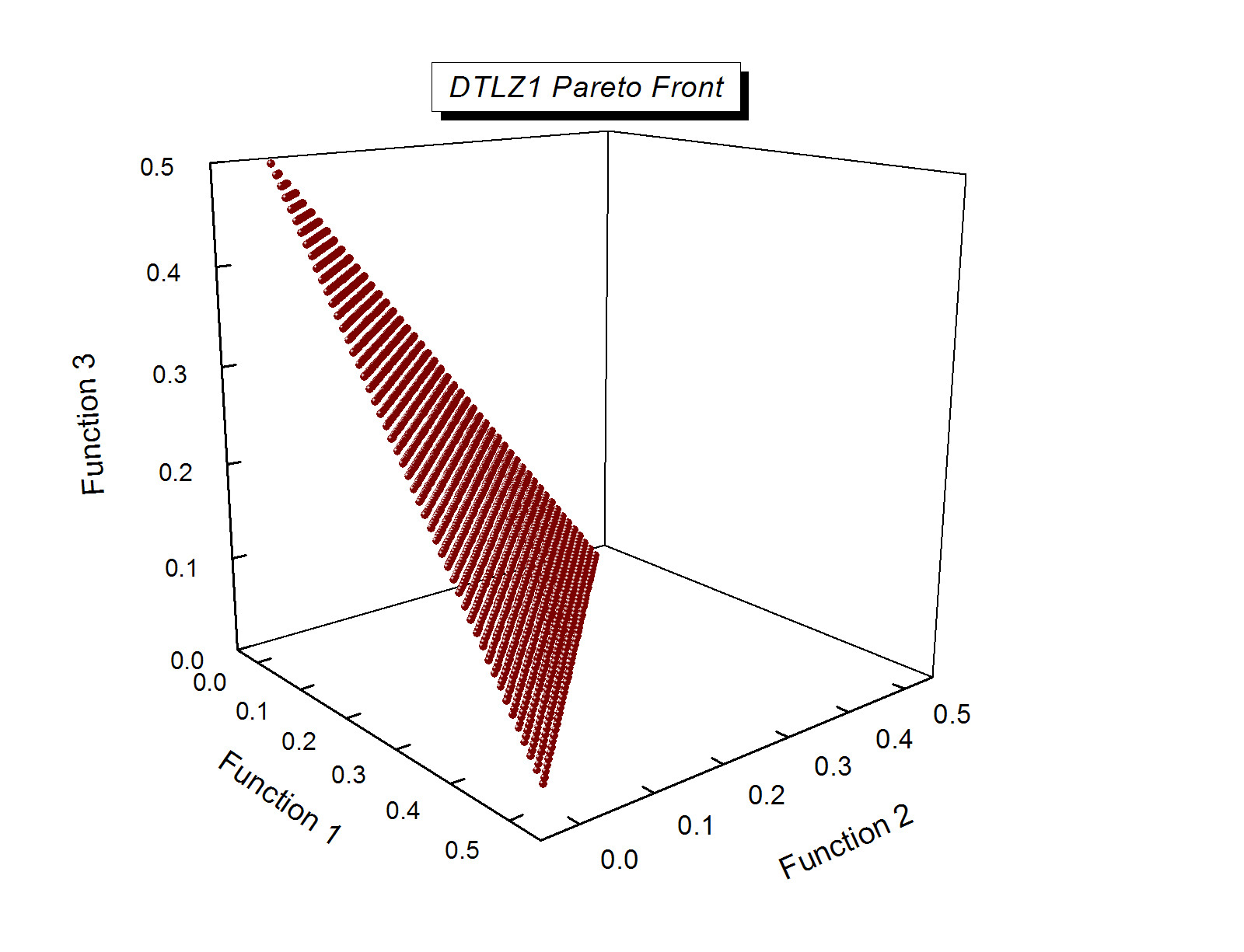 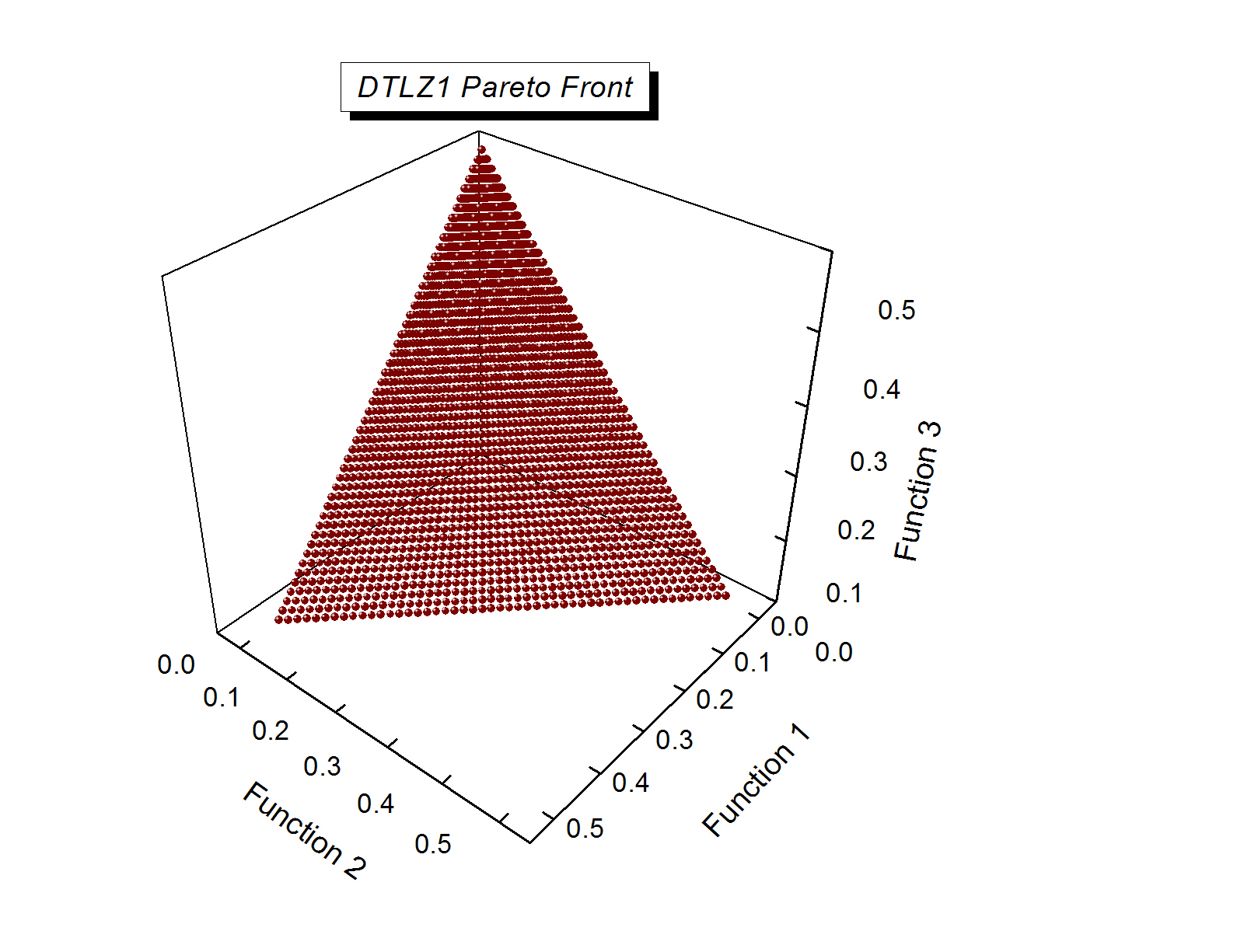 DTLZ1 Pareto Front (data file) |
||||||||||||||||||||||||||||||||||||||
| DTLZ7 | ||||||||||||||||||||||||||||||||||||||
| Proposed by Deb et. al [2] | Minimize
|
|
||||||||||||||||||||||||||||||||||||
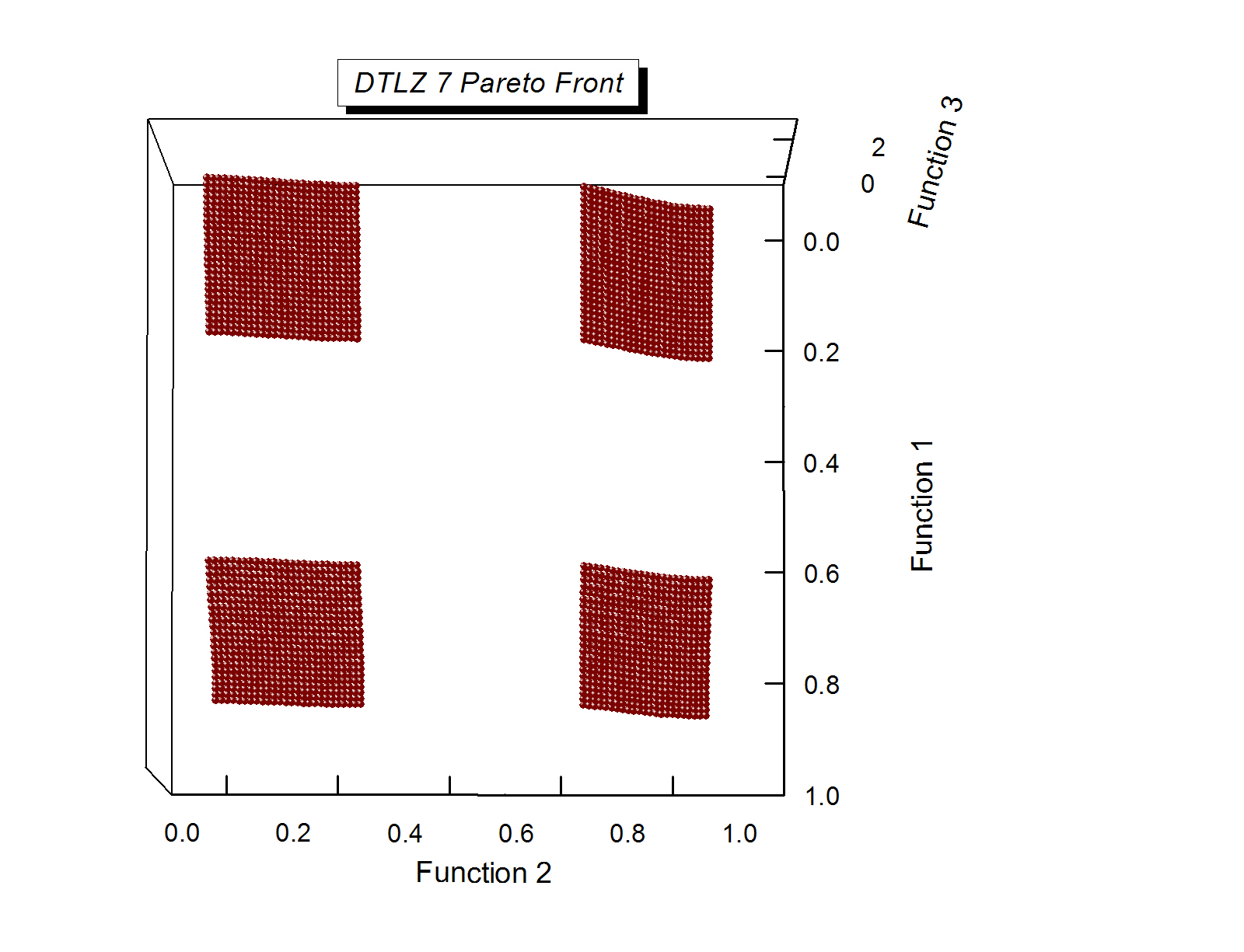 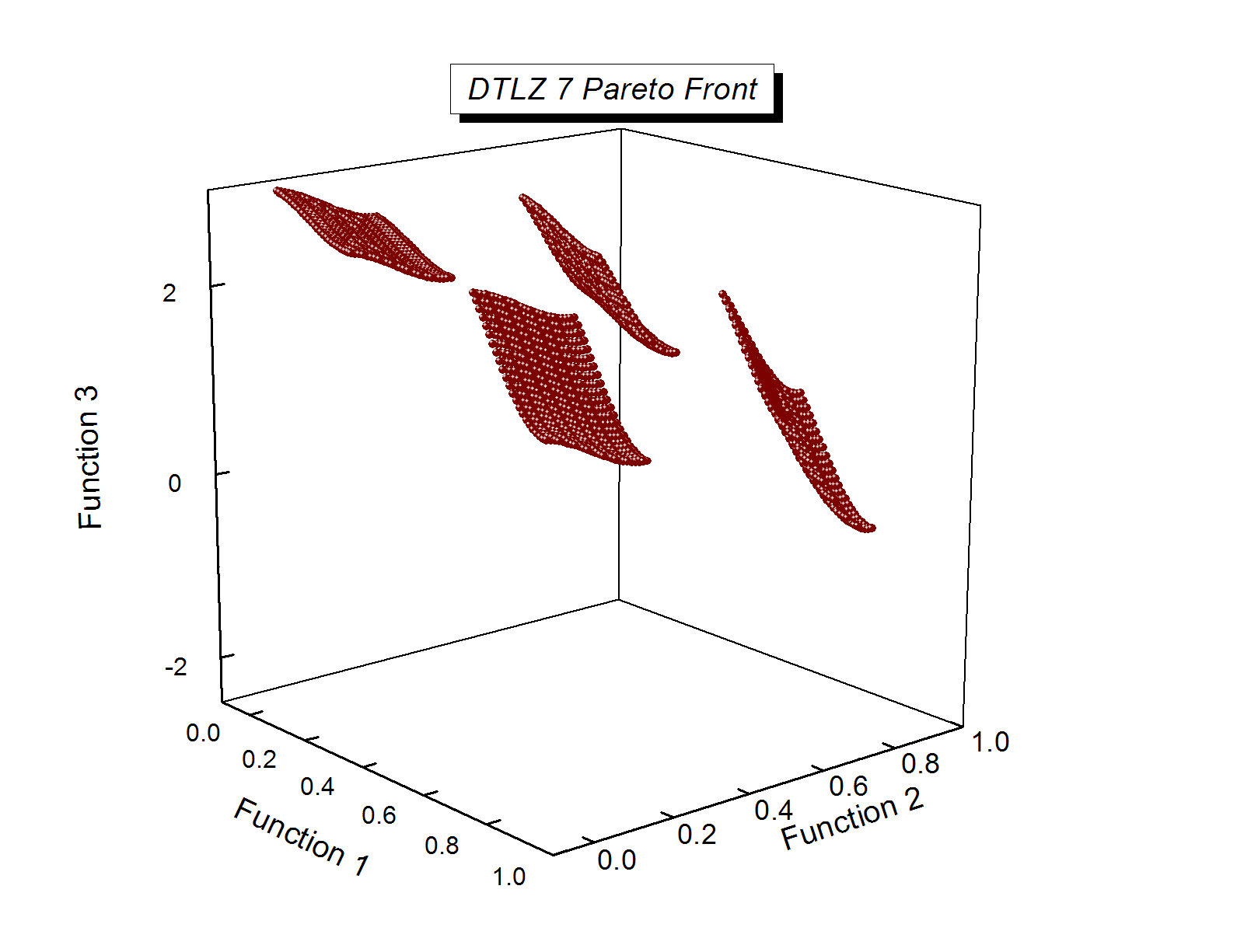 DTLZ7 Pareto Front (data file) |
||||||||||||||||||||||||||||||||||||||