El siguiente paso es establecer el método que se usará para resolver este
tipo de modelo de cadena.
Consideremos el modelo de la cadena diatómica compuesto de ``n''
partí culas con sus extremos fijos y las partículas que
intervienen de dos clases de masas diferentes en forma alternada;
numeraremos a las partículas por la sucesión
![]() , y los desplazamientos que sufran dichas partículas en
relación a su posición de equilibrio lo denotaremos por
, y los desplazamientos que sufran dichas partículas en
relación a su posición de equilibrio lo denotaremos por ![]() , . . . . .
, . . . . . ![]() , respectivamente;
esquemáticamente tenemos:
, respectivamente;
esquemáticamente tenemos:
![\includegraphics[width=4in]{imagenes/fig03.eps}](img8.png)
Puesto que en nuestro modelo es válida la ley de Hoke la fuerza
resultante aplicada a la i-ésima partícula, obedece a la
ecuación del tipo:
| (I-1 ) |
De una manera análoga las fuerzas restantes sobre las partículas 1 y
![]() serán de la forma:
serán de la forma:
De las ecuaciones anteriores no podemos decir que (I-1), sea
válida para todas las partículas, por lo que valiéndonos
de un artificio que consiste en agregar dos partículas
ficticias en cada extremo de la cadena, cuyos desplazamientos los
consideramos iguales a cero, con la anterior suposición,
las dos últimas ecuaciones tomarán la forma (I-1), y empleando un procedimiento
análogo con las partículas 2 y N-1 la ecuación (I-1)
será válida para todos los átomos de la cadena.
Expresando en otra forma la ecuación (I-1) que obedece a la segunda ley de
Newton se tiene:
| (I-2 ) |
Aplicando (I-2) a todas las partículas de la cadena y
simplificando los coeficientes de los desplazamientos obtenemos el
siguiente: sistema de ecuaciones diferenciales de segundo orden,
llamadas ecuaciones de movimiento.
1pt
 |
donde
![]() y
y
![]()
que expresada matricialmente adopta la siguiente forma:
| (I-3 ) |
![\begin{displaymath}
M = \left [\begin{array}{cccccc}
m_{1} & & & & & \\
& ...
... & & & & \ddots & \\
& & & & & m_{N}
\end{array} \right ]
\end{displaymath}](img24.png)
![\begin{displaymath}
X = \left [ \begin{array}{c}
x_{1} \\
x_{2} \\
\vdots \\
x_{i} \\
\vdots \\
x_{N} \\
\end{array} \right ]
\end{displaymath}](img25.png)
![\begin{displaymath}
K = \left [\begin{array}{cccccc}
A_{0} & A_{1} & A_{2} & ...
...ots & \\
& & & A_{2} & A_{1} & A_{0}
\end{array} \right ]
\end{displaymath}](img26.png)
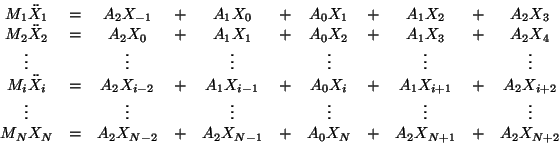
Despejando ![]() de las ecuaciones de movimiento (I-3)
obtenemos un sistema que en forma matricial puede ser expresado
como:
de las ecuaciones de movimiento (I-3)
obtenemos un sistema que en forma matricial puede ser expresado
como:
| (I-4 ) |
Una forma de resolver el sistema de ecuaciones diferenciales de
segundo orden así presentado, es llegar a obtener los
eigenvalores diagonalizando la matriz ![]() que es el producto
que es el producto ![]() .
.
Si se observa detenidamente la matriz ![]() se ve que no es
simétrica, aunque no singular.
se ve que no es
simétrica, aunque no singular.
Ahora bién, empleando un método que permita que dicha matriz
![]() adopte una forma simétrica facilitará muchos los
cálculos al efectuar la diagonalización, lo cual se logrará
en la siguiente forma.
adopte una forma simétrica facilitará muchos los
cálculos al efectuar la diagonalización, lo cual se logrará
en la siguiente forma.
Se multiplica por la izquierda a ambos miembros de la ecuación
(I-5) por la matriz que denotaremos por
![]() que el
resultado de aplicar el operador
que el
resultado de aplicar el operador
![]() a cada uno de
los elementos de la matriz diagonal M cuya estructura es:
a cada uno de
los elementos de la matriz diagonal M cuya estructura es:
![\begin{displaymath}
\left [\begin{array}{cccccc}
1/\sqrt{m_{1}} & & & & & \\...
...ddots & \\
& & & & & 1/\sqrt{m_{N} }
\end{array} \right ]
\end{displaymath}](img33.png)
Además agregando la matriz identidad ![]()
![]() obtenemos una ecuación del tipo:
obtenemos una ecuación del tipo:
| (I-5 ) |
donde
![]() resulta ser simétrica y se le conoce
con el nombre de matriz de movimiento o dinámica de la cadena diatómica.
resulta ser simétrica y se le conoce
con el nombre de matriz de movimiento o dinámica de la cadena diatómica.
La matriz ![]() en nuestro caso particular contiene
implicitamente a las masa de las partículas de la cadena en
una forma alternada que podemos denotar por ``m'' y ``M''.
Presentando la siguiente forma:
en nuestro caso particular contiene
implicitamente a las masa de las partículas de la cadena en
una forma alternada que podemos denotar por ``m'' y ``M''.
Presentando la siguiente forma:
![\begin{displaymath}
A = \left [\begin{array}{cccccc}
\frac{A_{0}}{m} & \frac{...
...rac{A_{1}}{\sqrt{mM}} & \frac{A_{0}}{m}
\end{array} \right ]
\end{displaymath}](img41.png) |
(I-6 ) |