Siguiente: El operador de Hodge
Arriba: El operador de Hodge
Anterior: El operador de Hodge
Teorema 3.1
Sean  un espacio de producto escalar de dimensión
un espacio de producto escalar de dimensión  y
y
 . Si
. Si
 , vale también
, vale también
 . En otras palabras: No hay un elemento isótropo en
. En otras palabras: No hay un elemento isótropo en
 .
.
Demostración
Supongamos
. La familia
 reducida al solo elemento
reducida al solo elemento  es una base de
. Todo elemento
es una base de
. Todo elemento
 se representa únicamente en la forma
se representa únicamente en la forma
 con
con
 . Si fuese
. Si fuese
 , sería también:
, sería también:
contrariamente al axioma iii) de producto escalar. Esta contradicción establece el teorema.

Demostración
Fijemos
tal que
. Todo -vector no nulo de puede representarse únicamente en la forma
con
 . De
ahí
. De
ahí
 . Ya que aquí
. Ya que aquí  , vemos que
, vemos que
 tiene el mismo signo que
tiene el mismo signo que
 .
.
Observación
Si es un espacio vectorial euclidiano, sabemos del teorema 3.2.4 que también
es un espacio vectorial euclidiano, luego en este caso:
Observación
Si
 es una base O.N. de (a suponer que existe), vale:
es una base O.N. de (a suponer que existe), vale:
 .
.
Teorema 3.3
Con las notaciones de la definición 3.3.1 vale:
Demostración
Por la fórmula (1) del teorema 3.2.1:
El teorema 3.3.3 dice que  es el gramiano del -uplo
.
es el gramiano del -uplo
.
Corolario 3.1
Si es un espacio real de producto escalar, provisto de una base
, vale:
Demostración
Fijemos arbitrariamente un -vector no nulo , de sentido positivo. Buscamos un -vector
 con
con  tal que
tal que
 .
Esta condición equivale a:
.
Esta condición equivale a:
de donde la única solución:
Finalmente:
 |
(1) |
Definición 3.2
Una base
de (necesariamente de sentido positivo) la llamaremos BASE CALIBRADA si:
Teorema 3.5
Si
es una base de sentido positivo de , vale:
 |
(2) |
Dicha base será, pues, una base calibrada si y sólo si:
Demostración
La fórmula (2) se obtiene al tomar
 en la
fórmula (1) del teorema 3.3.4.
en la
fórmula (1) del teorema 3.3.4.
Notación abreviada.
Si es un espacio vectorial euclidiano, escribiremos abreviadamente BASE O.N.P. por una base ortonormal de sentido positivo de .
De la observación después de la definición 3.3.1 y del teorema 3.3.5 sigue sin
más:
Corolario 3.2 (del teorema
3.3.5)
En un espacio vectorial euclidiano toda base O.N.P de es una base calibrada de .
Volvemos al caso general de un espacio real, orientado, de producto escalar.
En vista de la definición del producto volúmico, esta fórmula es equivalente a la fórmula (2) del teorema 3.3.5.
Los dos teoremas siguientes son evidentes:
Teorema 3.7
Vale
![$[\vec{x}_1,\ldots \vec{x}_n]=0$](img2322.png) si y sólo si el -uplo
si y sólo si el -uplo
 de vectores de
es linealmente dependiente.
de vectores de
es linealmente dependiente.
Teorema 3.8
Supongamos
![$[\vec{x}_1,\ldots,\vec{x}_n] \ne 0$](img2323.png) .
.
Vale
![$[\vec{x}_1,\ldots,\vec{x}_n] >0$](img2324.png) si
es una base de sentido positivo de E.
si
es una base de sentido positivo de E.
Vale
![$[\vec{x}_1,\ldots,\vec{x}_n] <0$](img2325.png) si
es una base de sentido negativo de E.
si
es una base de sentido negativo de E.
Esta fórmula equivale a cada una de las siguientes:
De ahí, en presencia de una base de , el  -vector
-vector
 tendrá también las mismas componentes covariantes y las mismas componentes contravariantes que el -covector
tendrá también las mismas componentes covariantes y las mismas componentes contravariantes que el -covector
 definido
por la fórmula (3).
definido
por la fórmula (3).
Demostración
Tenemos
 , equivalentemente
al tomar la componente de ambos miembros con respecto al -vector patrón
, equivalentemente
al tomar la componente de ambos miembros con respecto al -vector patrón
 :
:
Al aplicar el teorema 3.3.6 vemos que esto equivale a:
![\begin{displaymath}\mbox{\fbox{${\displaystyle [{\overline e}_H, {\overline e}_K] = \rho_{H,K} \sqrt{\vert g\vert}}$}}
\end{displaymath}](img2343.png) |
(5) |
Puesto que si
 vale
vale
 , luego
, luego  la fórmula (5) es la misma que la del enunciado.
la fórmula (5) es la misma que la del enunciado.
Teorema 3.9
El operador  es un isomorfismo lineal de
es un isomorfismo lineal de
 sobre
sobre
 .
.
Demostración
Puesto que
 es un isomorfismo lineal de
es un isomorfismo lineal de
 sobre
,
basta probar, en vista de la definición (4), que
sobre
,
basta probar, en vista de la definición (4), que  es un isomorfismo lineal de
sobre
.
es un isomorfismo lineal de
sobre
.
- Probemos la implicación:
 .
.
Sea, pues,
 tal que
tal que
 . Usando una base
de de sentido positivo escribimos:
. Usando una base
de de sentido positivo escribimos:
 . La hipótesis implica que existe
. La hipótesis implica que existe
![$H\subset [\![ 1,n]\!]$](img123.png) con
con  , tal que
, tal que  . Por la fórmula (3):
. Por la fórmula (3):
![\begin{displaymath}\mbox{\fbox{${\displaystyle \bigl\langle {\overline e}_{H^\pr...
... L\vert=r} x^L [{\overline e}_L, {\overline e}_{H^\prime}]}$}}
\end{displaymath}](img2352.png) |
(6) |
Por el lema 3.3.1 vale:
La fórmula (6) se reduce, pues, a:
Por lo tanto,
 , como afirmamos.
, como afirmamos.
- Se sigue del inciso a) que es una aplicación lineal inyectiva de
en
. Pero:
probando que es un isomorfismo de
sobre
.
Corolario 3.3
Consideremos al operador como endomorfismo lineal del álgebra  . Con esta óptica es de hecho un automorfismo lineal del álgebra sobre sí.
. Con esta óptica es de hecho un automorfismo lineal del álgebra sobre sí.
Definiciones equivalentes del operador
- En virtud de la definición del producto escalar en
, la fórmula
dice que
es el único -vector tal que
 se cumple:
se cumple:
o sea, por la definición (3) de :
 ,
es el único elemento de
tal que:
,
es el único elemento de
tal que:
 |
(7) |
(Según esta definición, se puede pensar en el operador como una ``máquina'' que transforma productos volúmicos en productos escalares).
- La fórmula (7) puede escribirse equivalentemente
al multiplicar sus dos miembros por el -vector patrón
:
 |
(8) |
(Así escrito el operador aparece como una máquina que transforma productos exteriores en productos escalares).
- Finalmente, para despejar
 de (8) podemos
escribir esta fórmula de manera equivalente al multiplicar escalarmente sus dos miembros por
:
de (8) podemos
escribir esta fórmula de manera equivalente al multiplicar escalarmente sus dos miembros por
:
 |
(9) |
Casos particulares.
- Caso
 .
.
- Por la fórmula (9) al tomar
 y
y
 obtenemos:
obtenemos:
y, puesto que
 se sigue de ahí:
se sigue de ahí:
o sea,
 :
:
- Caso
 .
.
- Al tomar en (9):
 y
y
 , obtenemos:
, obtenemos:
Destacando:
o sea, para todo elemento
 :
:
 |
(10) |
Observación
Sean
 elementos homogéneos del álgebra tales que:
elementos homogéneos del álgebra tales que:
Por definición del producto volúmico tenemos:
![\begin{displaymath}
{\overline x}_1 \wedge \cdots \wedge {\overline x}_r = [{\overline x}_1, \ldots,{\overline x}_r] {\overline \varepsilon}
\end{displaymath}](img2379.png) |
(11) |
Aplicando el operador () a ambos miembros de (11) y usando (10) obtenemos la fórmula:
Nota
La teoría del operador de Hodge la desarrollaremos principalmente mediante cálculo con bases y componentes. Sin repeticiones ulteriores:
Demostración
Por la definición (7) del operador de Hodge tenemos:
y la fórmula deseada resulta como consecuencia inmediata del lema 3.3.1.
Comentario
En vista de la fórmula (25) entre las ``fórmulas analíticas'' después del teorema 3.1.11, el lema 3.3.1 dice:
La componente covariante de índice  del -vector
del -vector
 es
es
 ; las
demás componentes covariantes valen cero. Equivalentemente:
; las
demás componentes covariantes valen cero. Equivalentemente:
 |
(12) |
o sea:
 |
(13) |
Vamos a dar una interesante aplicación geométrica de estas fórmulas.
Demostración
Sea  un
un  -vector descomponible no nulo. Podemos escribir:
-vector descomponible no nulo. Podemos escribir:
 , donde
, donde
 es una familia linealmente independiente de vectores de . Introduzcamos la
notación alternativa:
es una familia linealmente independiente de vectores de . Introduzcamos la
notación alternativa:
 y completemos el -uplo
y completemos el -uplo
 a una base:
a una base:
 de sentido
positivo. Sea
de sentido
positivo. Sea
 la base de
la base de  dual de ésta. Por la fórmula (12) del comentario anterior vale:
dual de ésta. Por la fórmula (12) del comentario anterior vale:
 |
(14) |
 es, pues, un -vector descomponible no nulo.
es, pues, un -vector descomponible no nulo.
También, por la demostración del teorema 2.2.8:
 |
(15) |
Ahora bien la fórmula (14) equivale a:
 |
(16) |
que es un -vector descomponible no nulo. Mediante (16) y (15) :
Teorema 3.11
(Componentes covariantes de
en función de las componentes contravariantes de ) Sea
. Escribámoslo
 . Designemos por
. Designemos por  con
con  , las componentes covariantes de
, las componentes covariantes de
 . Valen las fórmulas:
. Valen las fórmulas:
 |
(17) |
Demostración
La fórmula (12) del comentario del lema 3.3.2 reza:
 ,
,
Aquí el coeficiente de
 es la componente covariante
es la componente covariante
 de
de
 ,
de donde la fórmula (17).
,
de donde la fórmula (17).
Demostración
Sea
. Por la definición (9) del operador () vale:
 |
(19) |
Por el teorema 3.3.5, se tiene
 . Luego (19) se convierte en:
. Luego (19) se convierte en:
 |
(20) |
Aplicando al segundo miembro de (20) la fórmula del teorema 3.2.5, conseguimos:
o sea:
 |
(21) |
donde  son las componentes covariantes de y
son las componentes covariantes de y  son las
componentes covariantes de
son las
componentes covariantes de  .
.
Pero por la fórmula (28) entre las ``fórmulas analíticas'', después del teorema 3.1.11, tenemos también:
 |
(22) |
Finalmente, al igualar los coeficientes de en los segundos miembros de (21) y (22), obtenemos:
Teorema 3.13
se tiene:
Demostración
Designemos por
 , las componentes contravariantes de
, las componentes contravariantes de
 .
Aplicando la fórmula (18) del teorema 3.3.12 con el cambio de en
e intercambio de
.
Aplicando la fórmula (18) del teorema 3.3.12 con el cambio de en
e intercambio de  con hallamos:
con hallamos:
 |
(23) |
Por otra parte, por la fórmula (17) del teorema 3.3.11 vale:
 |
(24) |
Llevando (24) a (23) obtenemos:
 |
(25) |
Pero por el lema 1.1.2 se verifica:
luego, en definitiva, (25) reza:
Esta fórmula es equivalente a la del enunciado.
Observación
Designemos por un momento por  y
y  las restricciones del operador a sendos
espacios vectoriales
y
. La fórmula del teorema 3.3.13 equivale a:
las restricciones del operador a sendos
espacios vectoriales
y
. La fórmula del teorema 3.3.13 equivale a:
 |
(26) |
De ahí, al intercambiar con  :
:
 |
(27) |
Las fórmulas (26) y (27) entrañan que es una biyección de
sobre
. La biyección
inversa es
 , o sea, `` a menos del signo''. Esto ofrece una
nueva prueba del teorema 3.3.9.
, o sea, `` a menos del signo''. Esto ofrece una
nueva prueba del teorema 3.3.9.
Teorema 3.14
 se verifican las fórmulas:
Equivalentemente:
se verifican las fórmulas:
Equivalentemente:
Demostración
En virtud de la simetría del producto escalar basta mostrar que:
Ahora bien, por definición del operador tenemos
 :
:
o sea, por el teorema 3.3.13:
![\begin{displaymath}[\star {\overline y}, {\overline x}]= \left(\mbox{\rm Sgn } G \right)(-1)^{r(n-r)} ({\overline y}\vert {\overline x})
\end{displaymath}](img2438.png) |
(28) |
Pero
![$[\star {\overline y}, {\overline x}] = (-1)^{r(n-r)} [{\overline x}, \star {\overline y}]$](img2439.png) (pues
(pues
 por el teorema 1.1.5). Luego la fórmula (28) se convierte en:
por el teorema 1.1.5). Luego la fórmula (28) se convierte en:
Teorema 3.15
vale:
Demostración
Por definición del operador y el teorema 3.3.14 tenemos
:
Informalmente se puede enunciar el teorema 3.3.15 diciendo que el operador
es una ``casi-isometría'' de
sobre
, o sea, una
``isometría a menos del signo''. Será una genuina isometría, si
 , por ejemplo si es un espacio vectorial euclidiano. En el caso general,
el teorema 3.3.15 suministra una nueva prueba de que la restricción del operador a
es
una biyección de
sobre
, o sea, una nueva prueba (la tercera) del teorema 3.3.9.
, por ejemplo si es un espacio vectorial euclidiano. En el caso general,
el teorema 3.3.15 suministra una nueva prueba de que la restricción del operador a
es
una biyección de
sobre
, o sea, una nueva prueba (la tercera) del teorema 3.3.9.
En efecto sea
 tal que
tal que
 . Del teorema 3.3.15, se sigue de ahí
. Del teorema 3.3.15, se sigue de ahí
 . Por el axioma iii) de productos escalares, esto entraña
. Por el axioma iii) de productos escalares, esto entraña
 . El operador restringido a
es, pues, inyectivo.
Ya que
. El operador restringido a
es, pues, inyectivo.
Ya que
 , el operador es un isomorfismo lineal de
sobre
.
, el operador es un isomorfismo lineal de
sobre
.
Corolario 3.4 (del teorema
3.3.15)
Sean
 dos -uplos de vectores de . Sabemos que:
de donde, por el teorema 3.3.15:
o sea, en definitiva por el teorema 3.2.1:
Esta fórmula se llama FÓRMULA DE CAUCHY-BINET. Como caso particular obtenemos:
llamada IDENTIDAD DE LAGRANGE.
dos -uplos de vectores de . Sabemos que:
de donde, por el teorema 3.3.15:
o sea, en definitiva por el teorema 3.2.1:
Esta fórmula se llama FÓRMULA DE CAUCHY-BINET. Como caso particular obtenemos:
llamada IDENTIDAD DE LAGRANGE.
El segundo miembro de la última fórmula es el gramiano del -uplo
.
Una aplicación de la fórmula de Cauchy-Binet: Sean
una base de sentido positivo de y
un
-uplo arbitrario de vectores de .
![$\forall \, i,j \in [\![1,n]\!]$](img2455.png) sea
sea
 la componente covariante de índice
la componente covariante de índice  del vector
del vector  . Vale:
. Vale:
Demostración
Por la fórmula de Cauchy-Binet:
Pero por el teorema 3.3.6,
![$[\vec{e}_1,\ldots,\vec{e}_n]= \sqrt{\vert g\vert}$](img2459.png) , de donde la conclusión.
, de donde la conclusión.
Caracterización geométrica del operador de Hodge (Caso euclidiano).
Si es un espacio vectorial euclidiano y  , el número real no negativo,
, el número real no negativo,
 es la
familiar NORMA EUCLIDIANA (para los físicos MAGNITUD) del vector
es la
familiar NORMA EUCLIDIANA (para los físicos MAGNITUD) del vector  . Si
. Si  la DIRECCIÓN
de
la DIRECCIÓN
de  es el subespacio de dimensión uno engendrado por el vector . El SENTIDO del
vector es aquel de los dos sentidos de dicho subespacio
es el subespacio de dimensión uno engendrado por el vector . El SENTIDO del
vector es aquel de los dos sentidos de dicho subespacio
 , según la definición después del
teorema 1.4.17, al cual pertenece . Sea . Supongamos conocida:
, según la definición después del
teorema 1.4.17, al cual pertenece . Sea . Supongamos conocida:
- la dirección
 del vector . Aquí
del vector . Aquí
 . La información que de
ahí sacamos es que:
. La información que de
ahí sacamos es que:
 |
(29) |
- Supongamos que además de i) conocemos la ``magnitud'' de :
 .
Este conocimiento suministra:
.
Este conocimiento suministra:
 |
(30) |
- Si además de a) y b) conocemos también el sentido de , sabemos que
 si el sentido de es el de
si el sentido de es el de  y
y  si el sentido de
es el de
si el sentido de
es el de  , con lo que, junto con (30), viene determinado el número real
, con lo que, junto con (30), viene determinado el número real  y, luego, por (29) el vector .
y, luego, por (29) el vector .
En resumen: Dirección, magnitud y sentido determinan sin ambigüedad el vector .
Volvamos al operador de Hodge.
Sean un espacio vectorial euclidiano y
 . Puesto que
también
es un espacio vectorial euclidiano, vale
. Puesto que
también
es un espacio vectorial euclidiano, vale
 , pues no
hay elementos isótropos en un espacio vectorial euclidiano. Para caracterizar geométricamente el -vector
, cabe
suponer que
, pues no
hay elementos isótropos en un espacio vectorial euclidiano. Para caracterizar geométricamente el -vector
, cabe
suponer que  es un -vector descomponible, pues todo -vector es suma de -vectores descomponibles. Por el teorema 3.3.10, sabemos que
también
es un -vector descomponible.
es un -vector descomponible, pues todo -vector es suma de -vectores descomponibles. Por el teorema 3.3.10, sabemos que
también
es un -vector descomponible.
- La ``dirección'' de
se determina en virtud de los teoremas 3.3.10 y 1.5.5 por la fórmula:
pues si
 es cualquier base del subespacio
es cualquier base del subespacio
 de , vale:
de , vale:
 |
(31) |
- Por el teorema 3.3.15, la ``magnitud'' de
es:
(o sea,
 ).
).
- Finalmente, el ``sentido'' de
viene determinado por la fórmula:
![\begin{displaymath}\mbox{\fbox{${\displaystyle [{\overline x},\star {\overline x}] >0}$}}
\end{displaymath}](img2476.png) |
(32) |
que sigue del teorema 3.3.14.
En efecto, la fórmula (32) suministra el signo de  en (31).
en (31).
Nota
No sería quizá muy necesario restringir nuestra caracterización geométrica de
al caso euclidiano. Pero:
- Si no es un espacio vectorial euclidiano, el método falla en el caso de ser un elemento isótropo de
.
- La presencia del factor
 quitaría la nitidez y, pienso, carácter intuitivo a los resultados.
quitaría la nitidez y, pienso, carácter intuitivo a los resultados.
Sea dicho de paso, que todos los libros que tratan el operador de Hodge y que conozco, lo hacen solamente
en el caso euclidiano. Como se ve claramente por nuestra exposición, el estudio del caso general no presenta más molestias
que las apariciones del factor
, donde conviene. Y sí, hay espacios interesantes a estudiar que
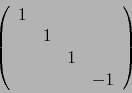
no son euclidianos, por ejemplo, el espacio usado en relatividad restringida es un espacio vectorial real de producto escalar de dimensión 4 que posee bases
con respecto a las cuales ![$[G]$](img2478.png) es la matriz diagonal:
es la matriz diagonal:
luego,  y también
y también
 .
.
Siguiente: El operador de Hodge
Arriba: El operador de Hodge
Anterior: El operador de Hodge
Guillermo M. Luna
2009-06-14


 en
en 
 . Vale pues:
. Vale pues:
![\begin{displaymath}[{\overline e}_L, {\overline e}_{H^\prime}]=
\left\{
\begin{a...
... \sqrt {\vert g\vert} & \mbox{si}\; L=H \\
\end{array}\right.
\end{displaymath}](img2353.png)


![\begin{eqnarray*}
{[\vec{x}_1,\ldots,\vec{x}_n]} &=& \star (\vec{x}_1 \wedge \cd...
...,\vec{y}_n]} &=& \star(\vec{y}_1 \wedge \cdots \wedge \vec{y}_n)
\end{eqnarray*}](img2451.png)
![\begin{eqnarray*}
\mbox{\rm Det }\left( (\xi_{ik})_{1\le i,k \le n} \right) &=& ...
... \right)[\vec{e}_1,\ldots,\vec{e}_n][\vec{x}_1,\ldots,\vec{x}_n]
\end{eqnarray*}](img2458.png)