Siguiente: El símbolo
Arriba: Álgebra exterior sobre un
Anterior: Álgebra exterior sobre un
Álgebra de Grassmann asociada a una base
Nota
En el presente capítulo se considerará espacios vectoriales sobre un cuerpo conmutativo  . Si se razona sobre varios espacios vectoriales, será sobreentendido que el cuerpo es el mismo para todos dichos espacios vectoriales.
. Si se razona sobre varios espacios vectoriales, será sobreentendido que el cuerpo es el mismo para todos dichos espacios vectoriales.
Los elementos de los llamaremos ocasionalmente ESCALARES conforme a una costumbre bastante generalizada actualmente. Los elementos de diferentes espacios vectoriales considerados se llamarán VECTORES y se designarán en general por letras con flechas encima.
Vamos a recordar un método simple para construir álgebras de rango finito (es decir de dimensión finita como espacio vectorial) sobre un cuerpo conmutativo .
Teorema 1.1
Sea  un espacio vectorial de dimensión finita sobre un cuerpo conmutativo
un espacio vectorial de dimensión finita sobre un cuerpo conmutativo
 , provisto de una base
, provisto de una base
 . Sea
. Sea
 , con índices
, con índices
![$i,j,k \in [\![ 1,n]\!]$](img58.png) , una familia arbitraria de elementos de . (Aquí como en todo el libro
, una familia arbitraria de elementos de . (Aquí como en todo el libro ![$[\![ 1,n ]\!]$](img59.png) designa el correspondiente intervalo en
designa el correspondiente intervalo en  , es decir, el conjunto
, es decir, el conjunto
 de enteros naturales).
de enteros naturales).
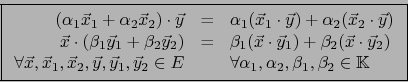
- Existe una y una sola aplicación bilineal
 de
de  en que verifica la TABLA DE MULTIPLICACIÓN:
en que verifica la TABLA DE MULTIPLICACIÓN:
- Un vector
 es el elemento uno del álgebra si y sólo si:
es el elemento uno del álgebra si y sólo si:
- El álgebra es asociativa si y sólo si vale:
Equivalentemente:
- El álgebra es conmutativa si y sólo si:
Equivalentemente:
Demostración
- Unicidad del álgebra.
Supongamos la existencia de una multiplicación
en conforme a la tabla de multiplicación.
Sean
![[*]](footnote.png) vectores arbitrarios en .
vectores arbitrarios en .
 . Por la bilinealidad de la multiplicación vale:
. Por la bilinealidad de la multiplicación vale:
de donde por la tabla de multiplicación:
 |
(1) |
El segundo miembro de (1) expresa el producto
 sin ambigüedad. Así pues, si el álgebra deseada existe, es única.
sin ambigüedad. Así pues, si el álgebra deseada existe, es única.
- Existencia del álgebra.
Definimos la aplicación
de en por la fórmula (1) . Consideremos tres vectores:
y dos escalares
 .
.
Vale
 de donde aplicando (1):
de donde aplicando (1):
Análogamente se prueba la ley:
Así pues la aplicación
es bilineal. Resta probar que es conforme a la tabla de multiplicación. Ahora bien,
usando las ``deltas de Kronecker'' podemos escribir
![$\forall \,l,m \in [\![ 1,n ]\!]$](img78.png) :
:
de donde, aplicando (1):
Así se ha probado la existencia del álgebra deseada.
- Supongamos que existe
tal que
![$\vec{1} \cdot \vec{e}_i = \vec{e}_i \cdot \vec{1} =\vec{e}_i \quad \forall \, i \in [\![ 1,n ]\!]$](img81.png) .
Si
.
Si
 es un vector arbitrario de , vale:
es un vector arbitrario de , vale:
Así pues  es el elemento uno de .
es el elemento uno de .
- Supongamos que valen las relaciones:
 |
(2) |
Consideremos tres vectores arbitrarios:
Por la bilinealidad de la multiplicación tenemos:
 y:
y:
 |
(3) |
Análogamente:
 |
(4) |
De (3), (4) y (2) se sigue:
Vale decir que el álgebra es un álgebra asociativa.
- Suponemos que valen las relaciones:
![\begin{displaymath}
\vec{e}_i \cdot \vec{e}_j = \vec{e}_j \cdot \vec{e}_i \quad \forall \, i,j \in [\![ 1,n ]\!]
\end{displaymath}](img90.png) |
(5) |
Para dos vectores arbitrarios:
 vale:
vale:
De (6), (7) y (5) obtenemos:
 .
Así pues, es un álgebra conmutativa.
.
Así pues, es un álgebra conmutativa.

Sea un cuerpo conmutativo. Fijemos
 . Usando el
procedimiento general suministrado por el teorema precedente vamos a
construir un álgebra de dimensión
. Usando el
procedimiento general suministrado por el teorema precedente vamos a
construir un álgebra de dimensión  que provisionalmente llamaremos
G (por ``Grassmann'').
que provisionalmente llamaremos
G (por ``Grassmann'').
Subsections
Siguiente: El símbolo
Arriba: Álgebra exterior sobre un
Anterior: Álgebra exterior sobre un
Guillermo M. Luna
2009-06-14


![\begin{displaymath}\fbox{${\displaystyle \vec{e}_i \cdot \vec{e}_j = \sum\limits...
...ma_{ij}^k \vec{e}_k \quad \forall \, i,j,k \in [\![ 1,n ]\!]}$}\end{displaymath}](img62.png)
![\begin{displaymath}\fbox{${\displaystyle \sum_{l=1}^n \gamma_{ij}^l \cdot \gamma...
... \gamma_{il}^m
\quad \forall \, i,j,k,m \in [\![ 1,n ]\!]
}$}\end{displaymath}](img65.png)